

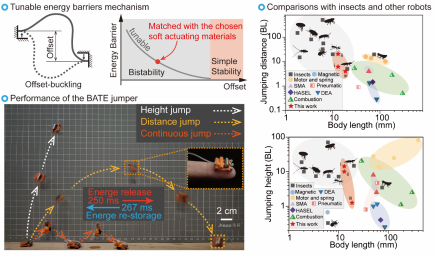
昆虫跳动机制(如叩头虫)启发了双稳态结构的规划,这种结构可以将缓慢的能量堆集转化为快速的跳动运动。但是,在完成昆虫标准(体长小于20毫米)的多形式跳动和接连跳动时,双稳态跳动机器人一般面对两方面的问题:首要,双稳态构型能量壁垒与软驱动资料输出功能失配:现存的软驱动资料往往存在单位体积内的包括的能量低、呼应速度慢以及康复时刻长等问题,导致能量开释和再贮存进程难以完成或许不行灵敏,约束了机器人的跳动频率和动态适应性。其次,操控杂乱性:现有根据对称构型的双稳态机器人往往需求额定的外部影响来操控跳动方向和高度。
为了战胜这一难题,本研讨提出了一种新的偏置委曲双稳态规划,该规划具有反对称平衡状况和可调理的能量壁垒。使用这一规划,开发了一种鸿沟致动可调能量壁垒(BATE)跳动器,体长小至15毫米。这种跳动机器人可以在高度跳动形式(高达12.7倍体长)和间隔跳动形式(高达20倍体长)之间转化,并可以履行灵敏的接连跳动,稳态间snap-through和snap-back的时刻都在300毫秒内。此外,该跳动机器人还展现了实时状况检测的才能用于检测潜在的毛病,如空气走漏,来提升了体系的可靠性。
这一具有昆虫级体现的BATE跳动机器人展现了其在探究、搜救等范畴的巨大潜力。因为其细巧灵敏的规划,使其在狭隘拥堵的空间和杂乱环境中具有共同的优势。例如,在灾后救援中,BATE跳动机器人能进入人类无法抵达的狭隘区域,进行查找和救援作业。
该研讨成果以《具有可调能量壁垒的双稳态昆虫级跳动器用于多模态运动》(Bistable Insect-Scale Jumpers with Tunable Energy Barriers for Multimodal Locomotion)为题在线发表于世界尖端期刊《先进科学》(Advanced Science)。该论文榜首作者为西安交通大学机械学院博士生郭庆凯,通讯作者为西安交通大学机械学院陈雪峰教授团队的孙瑜副教授、杨来浩副研讨员,西湖大学姜汉卿教授、博士后张壮。论文的榜首单位为西安交通大学。相关研讨得到了国家自然科学基金项目和国家严重基础研讨项目的赞助。
下一条:【科技自立自强】西安交大科研人员在优化车网互联渠道运营研讨方面获得新发展
