

电动机械式助力转向体系(EPS)没有了液压助力体系的液压泵、液压管路、转向管柱阀体等结构,结构分外的简略,经过减速器以纯机械方法将电机发生的助力传递到转向体系上。
EPS 电动助力转向体系是机电一体化的产品,它由转向管柱、扭矩传感器、伺服电机、操控模块等组成。

车辆发动后体系开端作业,当车速小于必定速度(如80km/h),这些信号输送到操控模块,操控模块依据转向盘的扭矩、滚动方向和车速等数据向伺服电机宣布操控指令,使伺服电机输出相应巨细及方向的扭矩以发生助动力,当不转向时,电控单元不向伺服电机发送扭矩信号,伺服电机的电流趋向于零。
因而,在直行驾驭而无需操作转向盘时,将不会耗费任何发动机的动力,降低了燃油耗费。
本体系供给的转向助力与车速成反比,当车速在必定速度(如80km/h)或以上时,伺服电机的电流也趋向于零,所以车速越高助力越小。因而,不管在高速、低速行进操作的流程中轿车具有更高的稳定性,驾驭员本身坚持均衡不变的转向力度。
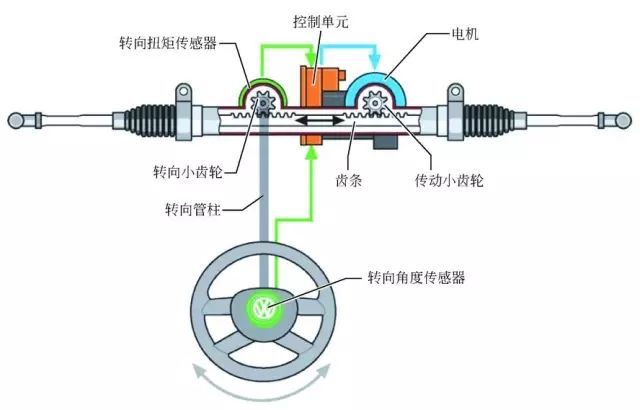

双小齿轮电控机械助力转向体系中,由转向小齿轮和传动小齿轮将必需的转向力传递给齿条。驾驭员施加的扭矩经过转向小齿轮来传递,而传动小齿轮则经过蜗杆传动装置传递电控机械助力转向体系电机的支撑扭矩。
转向器由转向扭矩传感器、改变杆、转向小齿轮、传动小齿轮、蜗杆传动装置以及带操控单元的电机构成。
用于转向支撑的电机带有操控单元和传感单元,它安装在第二个小齿轮上。这样就建立了转向盘和齿条之间的机械衔接。因而,当伺服电机失灵时,车辆仍可以终究靠物理运动进行转向。
转向视点传感器坐落复位环后侧,复位环上带有一个安全气囊滑环。转向视点传感器经过CAN 数据总线将信号传递到转向管柱电子操控单元J527,由此操控单元得悉了转向视点
转向扭矩传感器将转向盘扭矩直接传递给转向小齿轮。传感器依据磁阻原理进行作业。为了承认和确保最高的安全性,它采用了两层结构(冗余结构)。
转向管柱衔接在扭矩传感器上,转向器经过改变杆衔接在扭矩传感器上。衔接转向管柱的元件上有一个磁极转子,在这个转子中不同磁极的24 个区域轮番替换。每次运用两个磁极来进行扭矩剖析。
转子转速传感器是电控机械助力转向体系电机的组成部分。无法从外部接触到转子转速传感器。

2—因为转向盘上扭矩的效果,转向器中的扭矩杆滚动。转向扭矩传感器J269 勘探扭矩杆的滚动,并将勘探到的转向扭矩传递给操控单元;
4—操控单元依据转向扭矩、车速、发动机转速、转向视点、转向速度和操控单元中的特性曲线计算出必需的支撑扭矩,并发动电机;
5—由第二个平行效果于齿条的小齿轮来进行转向支撑,小齿轮的传动由电机来进行,电机经过一个蜗杆传动装置和一个传动小齿轮将转向支撑力传递到齿条上;
6—转向盘上的扭矩和支撑扭矩的总和便是转向器上的有用扭矩,由该扭矩来传动齿条。
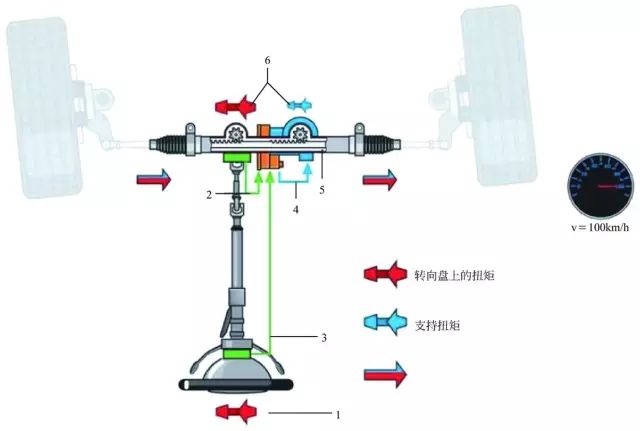
2—改变杆因而滚动,转向扭矩传感器得悉改变杆滚动并告诉操控单元,转向盘上有一个小的扭矩;
4—依据一个小的转向扭矩、100km/h 的车速、发动机转速、小的转向视点、转向速度及操控单元中的特性曲线km/h 车速的特性曲线),操控单元得悉必须有一个小的支撑扭矩或无需支撑扭矩,继而发动电机;
5—高速公路行进时,由第二个平行效果于齿条的小齿轮来进行一个小的转向支撑,或许不进行转向支撑;
6—转向盘上扭矩加上最小支撑扭矩便是换车道时的有用扭矩,由该扭矩来传动齿条
