


,可是不要紧,就让小编为我们处理这一难题吧,快来学习一下吧,很涨姿态的哦~~~
伺服电机(servo motor ),又称履行电机,是指在伺服系统中操控机械元件作业的发动机,是一种补助马达直接变速装置。它可以使操控速度、方位精度十分精确,可以将电压信号转化为转矩和转速以驱动操控目标。伺服电机可大致分为直流伺服电机和沟通伺服电机。它可以适用于对本钱灵敏的一般工业和民用场合。

沟通伺服电机也是由定子和转子构成。它的定子的结构基本上与电容分相式单相异步电动机类似,其定子上装有两个方位互差90°的绕组,一个是励磁绕组Rf,它一直接在沟通电压Uf上;另一个是操控绕组L,联接操控信号电压Uc。所以沟通伺服电动机又称两个伺服电动机。
沟通伺服电动机的转子一般做成鼠笼式,但为了使伺服电动机具有较宽的调速规模、线性的机械特性,无“自转”现象和快速呼应的功能,它与一般电动机比较,应具有转子电阻大和滚动惯量小这两个特色。
沟通伺服电机的作业原理与两相异步电机类似 。可是因为它在数字操控机床中作为履行元件,将沟通电信号转换为轴上的角位移或角速度,所以要求转子速度的快慢可以反映操控信号的相位,无操控信号时它不滚动。
因为定子上的两个绕组在空间相差90°电视点,如果在两相绕组上加以幅值持平、相位差90°电视点的对称电压,则在电机的气隙中发生圆形的旋转磁场。若两个电压的幅值不等或相位不为90°电视点,则发生的磁场将是一个椭圆形旋转磁场。加在操控绕组上的信号不同,发生的磁场椭圆度也不同。
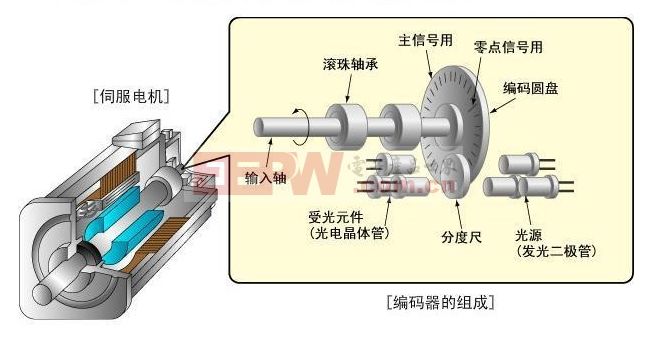
伺服电机内部的转子是永磁铁,驱动器操控的U/V/W三相电构成电磁场,转子在此磁场的效果下滚动,一起电机自带的编码器反应信号给驱动器,驱动器依据反应值与目标值作比较,调整转子滚动的视点。
电动缸价格
- 2024-11-12欢迎来到火狐体育app
- 2024-11-12家电智慧生活
- 2024-11-12《大梦归离》上线国剧虚拟制造技能使用又获新打破
- 2024-11-12小身段高功率吉尼电动小曲臂
- 2024-11-05机械轴是什么
- 2024-11-03“一核两极四轴”格局!《广州都市圈发展规划》发布
- 2024-11-03一核两极四轴!广州都市圈这样建
- 2024-11-02向“新”出发寻找新质生产力 完全自主三维云CAD平台CrownCAD为新质生产力创新赋能
- 2024-11-02完成车身规划优化软件自主可控
- 2024-10-25盘点全球十大机器人运动控制品牌
- 2024-10-25现代运动控制管理系统及其应用
- 2024-10-25基于多轴运动控制器的间歇式轮转印刷机控制系统
电动缸厂家
- 2024-11-14中国铁建推出创新社区沙盘模型演示设备不容错过的展示体验
- 2024-11-12天极网_专业IT门户
- 2024-11-11以技术创新塑造产品力本末科技重新定义直驱电机效能
- 2024-11-11为何各大厂商都在大力推广磁悬浮空调?
- 2024-11-11养老辅助器具及适老化产品质量调查|爬楼机:履带齿距过大、颠簸感强的产品接受度低
- 2024-11-10电动机控制管理系统的故障诊断与排除方法是什么?
- 2024-11-10伺服驱动器的过流故障与过电压故障伺服驱动器的常见维修
- 2024-11-05德承DX-1000嵌入式工控机助力城市公交PIDS体系!
- 2024-11-03激光一枝独秀维宏“控制”节拍
- 2024-11-03高川自动化联合深圳技术大学成立实验室发布PCle运动控制卡新品
- 2024-11-02这台全球热销的小型suv有毒 它的卖点是什么
- 2024-11-02主板的每个部分及其功能
相关产品
- 2024-11-142024年我国变压器商场现状及企业散布状况猜测剖析(图)
- 2024-11-122025年非洲南非开普敦电力、能源、智能电网、表计展
- 2024-11-12东平±800千伏特高压换流站首台换流变压器就位(图片新闻)
- 2024-11-12北极星智能电网在线
- 2024-11-11电子工程世界
- 2024-11-05东吴证券:给予恒立液压买入评级
- 2024-11-03冷空气的效果原理 冷空气是往上仍是往下
- 2024-11-03流量仪表-流量仪表专栏为您展示的动态 - OFweek仪器网
- 2024-11-02冲击试验机有这7个大类您都知道吗?
- 2024-11-02高低温冲击试验机在过流保护时有哪些表现
